



Nan liy pwodiksyon anbalaj otomatik modèn yo, efikasite, presizyon, ak kontinwite se estanda an lò pou avansman. Soti nan anbalaj pwodwi ak palètizasyon robotik presi rive nan asanblaj presizyon sou tab wotasyon ak idantifikasyon entelijan nan sistèm klasman gwo vitès, chak pwosesis mande pou mouvman san restriksyon. Sepandan, sa prezante yon defi enpòtan: kijan pou transmèt pouvwa, siyal kontwòl, ak done gwo vitès yon fason ki estab ant konpozan ki wotasyon 360° yo ak estrikti machin estasyonè a?
Bag glisman kondiktif yo se "mwaye silansye" ak "pon enèji" ki rezoud pwoblèm sa a. Kòm yon konpozan elektwomekanik presizyon, yo reyalize yon koneksyon elektrik pafè ant estrikti estasyonè ak estrikti wotasyon, sa ki asire yon sikilasyon san pwoblèm nan enèji ak enfòmasyon. Yo se fondasyon prensipal pou operasyon efikas ak kontinyèl tout liy anbalaj otomatik la.
1. Prensip Operasyon ak Valè Debaz Bag Glisman Kondiktif yo
Senpleman, yon bag glisman kondiktif konsiste de de pati: yon rotor ki konekte ak eleman wotasyon an ak yon stator ki konekte ak estrikti estasyonè a. Prensip debaz li se itilize bwòs alyaj metal presye oswa bwòs fib an kontak glisman ak yon tras bag presizyon pou kenbe kondiksyon elektrik kontinyèl pandan wotasyon kontinyèl.
Nan domèn anbalaj otomatik la, valè fondamantal li yo se:
- Libète anba kontrent mouvman: Pèmèt ekipman yo fè wotasyon san limit, kontinyèl pou plizyè revolisyon san yo pa bezwen pè ke kab yo mele oswa tòde.
- Asire entegrite siyal la: Transmisyon ki estab nan pouvwa motè sèrvo, siyal detèktè, done kamera vizyon, siyal kontwòl pneumatik, ak plis ankò asire yon kontwòl presi.
- Amelyore fyabilite ekipman yo: Evite pann ki koze pa kase kab, pwolonje lavi ekipman yo anpil, epi diminye depans antretyen yo.
2. Senaryo Aplikasyon Bag Glisman nan Ekipman Anbalaj Kle yo
1. Machin anbalaj: Gadyen wotasyon enfini an
Machin anbalaj yo bezwen vlope fim nan avèk presizyon e inifòm otou machandiz ki sou palèt. Mouvman prensipal yo se wotasyon kontinyèl plato a ak mouvman vètikal charyo fim nan. Bag glisman yo tipikman enstale nan pati anba plato a ki ap vire, responsab pou bay siyal pouvwa ak kontwòl bay detèktè fotoelektrik yo (pou detekte wotè chaj) sou plato a, sistèm servo kondwi yo, ak posib bra près anlè yo. San bag glisman, plak la ki ap vire ka sèlman balanse nan yon ranje limite, sa ki fè anbalaj efikas ak presi enposib.
Kounye a, bag glisman ki pi souvan itilize pa kliyan nou yo se estanda a25mmdyamèt enteryè ak38mmbag glisman ki pase nan twou ak dyamèt enteryè. Nou genyen tou kliyan k ap itilize machin anbalaj ak dyamèt enteryè estanda60mm, 70mm, oubyen80mm.
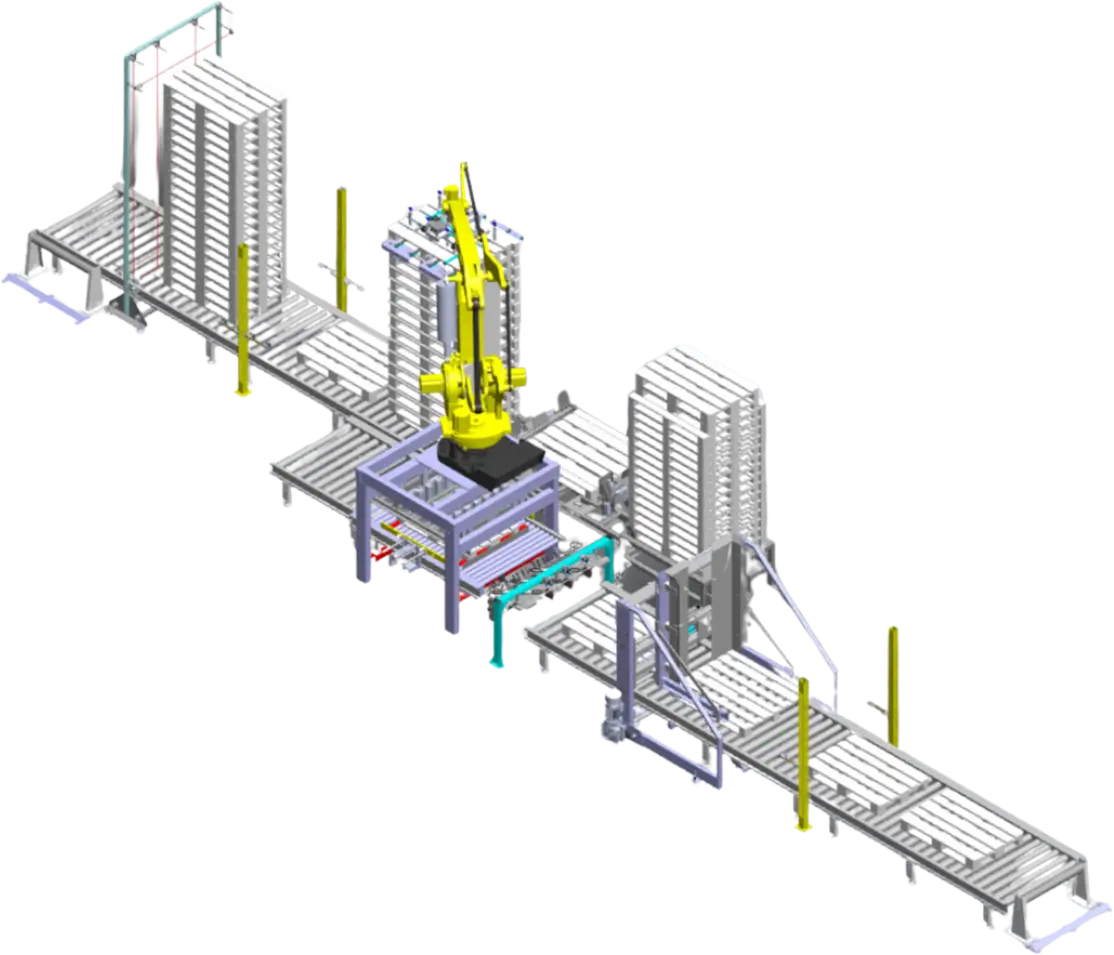
2. Palettizè Robotik: Jwenti Enèji Dans
Palètizatè robotik atikile yo se zetwal liy anbalaj yo. Mouvman ajil "bra" yo depann sou wotasyon presi nan chak jwenti. Bag glisman kontra enfòmèl ant, milti-chanèl yo souvan entegre nan baz robo a oswa jwenti prensipal yo. Yo bay motè sèrvo jwenti a pouvwa pandan y ap transmèt tou siyal priz ki soti nan priz fen liy lan (tankou yon gode vakyòm oswa dwèt robotik), done ki soti nan detèktè presyon, ak done ki soti nan nenpòt kamera pozisyon vizyon entegre. Pèfòmans bag glisman yo detèmine dirèkteman fluidite mouvman robo a, presizyon priz, ak kadans operasyonèl jeneral.
LaBag glisman kondiktif seri twou DHKepiBag glise kondiktif seri Ethernetdevlope pa Ingiant yo lajman itilize nan divès bra robotik.


3. Tab Asanblaj Rotary/Plat Tounè Milti-Estasyon: Yon Sant Kòmand pou Kolaborasyon Efikas
Nan pwosesis tankou ranpli, bouche, mete etikèt, ak mete nan katon, tab asanblaj wotasyon milti-estasyon an enpòtan pou amelyore efikasite pwodiksyon an. Tab la vire peryodikman, epi chak estasyon fè yon operasyon espesifik pandan l ap kanpe. Yon bag glisman kondiktif ki monte nan sant plat la aji kòm yon "sant kòmand santral," li bay pouvwa ak siyal pou tiyo solenoid pneumatik (silenn kontwòl), tournevis elektrik, detèktè, ak limyè endikatè nan plizyè estasyon. Sa asire ke aktuateur nan tout estasyon yo toujou pare pandan pwosesis wotasyon an epi li kenbe kominikasyon an tan reyèl ak sistèm kontwòl prensipal la, sa ki pèmèt yon senkronizasyon presi.
Tab asanblaj wotasyon yo patikilyèman apwopriye pou bag glisman ki mande gwo presizyon (fib optik, transmisyon elektrik gwo vitès), kondisyon dinamik (ki mande yon transmisyon ki estab pandan wotasyon), ak estrikti konplèks (plizyè chanèl, gwo dimansyon). Valè fondamantal yo se amelyore efikasite ak presizyon asanblaj atravè yon anviwònman wotasyon kontwole, tout pandan y ap diminye depans komisyonin ki vin apre yo.
4. Sistèm Klasman Otomatik: Pòtay Wotasyon pou Inondasyon Done yo
Nwayo yon sistèm tri otomatik rapid, tankou yon triyè kwa-kous, se yon bouk wotasyon rapid kote plizyè santèn kabwa k ap pote pakè yo distribye. Chak kabwa se yon inite entelijan endepandan, ki ka bezwen kouran pou fè motè senti li mache epi kominikasyon avèk yon sistèm kontwòl santral pou libere pakè yo nan moman egzak la. Bag glisman yo aji kòm yon "pòtay done" isit la. Kanpe nan sant platfòm wotasyon masif triyè a, yo etabli yon kanal kouran ak done rapid ant konsole kontwòl estasyonè a ak tout kabwa k ap deplase yo, sa ki asire yon koule san antrav gwo kantite enfòmasyon sou tri epi reyalize yon to tri etonan pa minit.
Seleksyon bag glisman pou sistèm klasman otomatik yo bezwen konbine avèk kalite transmisyon an (elektrik/optik/likid), vitès wotasyon, kantite chanèl, ak egzijans anviwònman an. Anjeneral, yo chwazi bag glisman kondiktif mikwo gwo vitès, bag glisman fib optik, bag glisman likid pneumatik, ak bag glisman entegre ibrid.

3. Seleksyon ak Antretyen: Asire yon Liy Pwodiksyon ki Pa Sispann
Chwazi bon bag glisman pou ekipman anbalaj otomatik enpòtan anpil. Konsidere kantite chanèl yo (pouvwa, siyal, ak gaz/likid), nivo kouran ak vòltaj, vitès wotasyon, klasman IP, ak iminite entèferans siyal la.tankou pwoteksyon pou siyal Ethernet ak CAN bus).
Bag glisman kalite siperyè yo ofri yon lavi sèvis ki long anpil epi yo pa bezwen anpil antretyen. Li enpòtan pou tcheke regilyèman mete bwòs yo epi kenbe pwòpte entèn la (sitou nan anviwònman pousyè atelye anbalaj la) pou asire yon operasyon ki estab alontèm.
Konklizyon
Malgre yo kache andedan ekipman yo epi yo raman vizib, bag glisman yo se yon teknoloji endispansab pou liy pwodiksyon anbalaj otomatik modèn yo. Yo fòme fondasyon fizik pou wotasyon san limit, kontwòl entelijan, ak kolaborasyon efikas. Soti nan anroule ak palètize rive nan asanblaj ak klasman, bag glisman yo aji tankou yon patnè silansye, kolabore san pwoblèm ak ekipman otomatik yo pou enkòpore efikasite ak presizyon anbalaj endistriyèl modèn yo epi kontinye kondwi inovasyon ak devlopman nan fabrikasyon entelijan.
Dat piblikasyon: 29 Out 2025